jika kamu anak motor klik disini
jika kamu ST SETIA delok en nang kene man
jika kamu OSD ORD ini
jika kamu suka PLC klik disini
jika kamu PELISTRIK klik disini

Kamis, 24 November 2011
Kamis, 17 November 2011
PUIL 2000
Sejarah Singkat PUIL
Peraturan instalasi listrik yang pertama kali digunakan sebagai pedoman beberapa instansi yang berkaitan dengan instalasi listrik adalah AVE (Algemene Voorschriften voor Electrische Sterkstroom Instalaties) yang diterbitkan sebagai Norma N 2004 oleh Dewan Normalisasi Pemerintah Hindia Belanda. Kemudian AVE N 2004 ini diterjemahkan ke dalam bahasa Indonesia dan diterbitkan pada tahun 1964 sebagai Norma Indonesia NI6 yang kemudian dikenal sebagai Peraturan Umum Instalasi Listrik disingkat PUIL 1964, yang merupakan penerbitan pertama dan PUIL 1977 dan PUIL 1987 adalah penerbitan PUIL yang kedua dan ketiga yang merupakan hasil penyempurnaan atau revisi dari PUIL sebelumnya, maka PUIL 2000 ini merupakan terbitan ke 4.
Jika dalam penerbitan PUIL 1964, 1977 dan 1987 nama buku ini adalah Peraturan Umum Instalasi Listrik, maka pada penerbitan sekarang tahun 2000, namanya menjadi Persyaratan Umum Instalasi Listrik dengan tetap mempertahankan singkatannya yang sama yaitu PUIL.
Penggantian dari kata “Peraturan” menjadi “Persyaratan” dianggap lebih tepat karena pada perkataan “peraturan” terkait pengertian adanya kewajiban untuk mematuhi ketentuannya dan sangsinya. Sebagaimana diketahui sejak AVE sampai dengan PUIL 1987 pengertian kewajiban mematuhi ketentuan dan sangsinya tidak diberlakukan sebab isinya selain mengandung hal-hal yang dapat dijadikan peraturan juga mengandung rekomendasi ataupun ketentuan atau persyaratan teknis yang dapat dijadikan pedoman dalam pelaksanaan pekerjaan instalasi listrik.
Sejak dilakukannya penyempurnaan PUIL 1964, publikasi atau terbitan standar IEC (International Electrotechnical Commission) khususnya IEC 60364 menjadi salah satu acuan utama disamping standar internasional lainnya. Juga dalam terbitan PUIL 2000, usaha untuk lebih mengacu IEC ke dalam PUIL terus dilakukan, walaupun demikian dari segi kemanfaatan atau kesesuaian dengan keadaan di Indonesia beberapa ketentuan mengacu pada standar dari NEC (National Electric Code), VDE (Verband Deutscher Elektrotechniker) dan SAA (Standards Association Australia).
PUIL 2000 merupakan hasil revisi dari PUIL 1987, yang dilaksanakan oleh Panitia Revisi PUIL 1987 yang ditetapkan oleh Menteri Pertambangan dan Energi dalam Surat Keputusan Menteri No:24-12/40/600.3/1999, tertanggal 30 April 1999 dan No:51-12/40/600.3/1999, tertanggal 20 Agustus 1999. Anggota Panitia Revisi PUIL tersebut terdiri dari wakil dari berbagai Departemen seperti DEPTAMBEN, DEPKES, DEPNAKER, DEPERINDAG, BSN, PT PLN, PT Pertamina, YUPTL, APPI, AKLI, INKINDO, APKABEL, APITINDO, MKI, HAEI, Perguruan Tinggi ITB, ITI, ISTN, UNTAG, STTY-PLN, PT Schneider Indonesia dan pihak pihak lain yang terkait.
Bagian 1 dan Bagian 2 tentang Pendahuluan dan Persyaratan dasar merupakan padanan dari IEC 364-1 Part 1 dan Part 2 tentang Scope, Object Fundamental Principles and Definitions.
Bagian 3 tentang Proteksi untuk keselamatan banyak mengacu pada IEC 60364 Part 4 tentang Protection for safety. Bahkan istilah yang berkaitan dengan tindakan proteksi seperti SELV yang bahasa Indonesianya adalah tegangan extra rendah pengaman digunakan sebagai istilah baku, demikian pula istilah PELV dan FELV. PELV adalah istilah SELV yang dibumikan sedangkan FELV adalah sama dengan tegangan extra rendah fungsional. Sistem kode untuk menunjukan tingkat proteksi yang diberikan oleh selungkup dari sentuh langsung ke bagian yang berbahaya, seluruhnya diambil dari IEC dengan kode IP (International Protection). Demikian pula halnya dengan pengkodean jenis sistem pembumian. Kode TN mengganti kode PNP dalam PUIL 1987, demikian juga kode TT untuk kode PP dan kode IT untuk kode HP.
Bagian 4 tentang Perancangan instalasi listrik, dalam IEC 60364 Part 3 yaitu Assessment of General Characteristics, tetapi isinya banyak mengutip dari SAA Wiring Rules dalam section General Arrangement tentang perhitungan kebutuhan maksimum dan penentuan jumlah titik sambung pada sirkit akhir.
Bagian 5 tentang Perlengkapan Listrik mengacu pada IEC 60364 Part 5: Selection and erection of electrical equipment dan standar NEC.
Bagian 6 tentang Perlengkapan hubung bagi dan kendali (PHB) serta komponennya merupakan pengembangan Bab 6 PUIL 1987 dengan ditambah unsur unsur dari NEC.
Bagian 7 tentang Penghantar dan pemasangannya tidak banyak berubah dari Bab 7 PUIL 1987. Perubahan yang ada mengacu pada IEC misalnya cara penulisan kelas tegangan dari penghantar. Ketentuan dalam Bagian 7 ini banyak mengutip dari standar VDE. Dan hal hal yang berkaitan dengan tegangan tinggi dihapus.
Bagian 8 tentang Ketentuan untuk berbagai ruang dan instalasi khusus merupakan pengembangan dari Bab 8 PUIL 1987. Dalam PUIL 2000 dimasukkan pula klarifikasi zona yang diambil dari IEC, yang berpengaruh pada pemilihan dari perlengkapan listrik dan cara pemasangannya di berbagai ruang khusus. Ketentuan dalam Bagian 8 ini merupakan bagian dari IEC 60364 Part 7, Requirements for special installations or locations.
Bagian 9 meliputi Pengusahaan instalasi listrik. Pengusahaan dimaksudkan sebagai perancangan, pembangunan, pemasangan, pelayanan, pemeliharaan, pemeriksaan dan pengujian instalasi listrik serta proteksinya. Di IEC 60364, pemeriksaan dan pengujian awal instalasi listrik dibahas dalam Part 6: Verification. PUIL 2000 berlaku untuk instalasi listrik dalam bangunan dan sekitarnya untuk tegangan rendah sampai 1000 V a.b dan 1500 V a.s, dan gardu transformator distribusi tegangan menengah sampai dengan 35 kV. Ketentuan tentang transformator distribusi tegangan menengah mengacu dari NEC 1999.
Pembagian dalam sembilan bagian dengan judulnya pada dasarnya sama dengan bagian yang sama pada PUIL 1987. PUIL 2000 tidak menyebut pembagiannya dalam Pasal, Subpasal, Ayat atau Subayat. Pembedaan tingkatnya dapat dilihat dari sistim penomorannya dengan digit. Contohnya Bagian 4, dibagi dalam 4.1; 4.2; dan seterusnya, sedangkan 4.2 dibagi dalam 4.2.1 sampai dengan 4.2.9 dibagi lagi dalam 4.2.9.1 sampai dengan 4.2.9.4. Jadi untuk menunjuk kepada suatu ketentuan, cukup dengan menuliskan nomor dengan jumlah digitnya.
Seperti halnya pada PUIL 1987, PUIL 2000 dilengkapi pula dengan indeks dan lampiran lampiran lainnya pada akhir buku. Lampiran mengenai pertolongan pertama pada korban kejut listrik yang dilakukan dengan pemberian pernapasan bantuan, diambilkan dari standar SAA, berbeda dengan PUIL 1987.
Untuk menampung perkembangan di bidang instalasi listrik misalnya karena adanya ketentuan baru dalam IEC yang dipandang penting untuk dimasukkan dalam PUIL, atau karena adanya saran, tanggapan dari masyarakat pengguna PUIL, maka dikandung maksud bila dipandang perlu akan menerbitkan amandemen pada PUIL 2000. Untuk menangani hal hal tersebut telah dibentuk Panitia Tetap PUIL. Panitia Tetap PUIL dapat diminta pendapatnya jika terdapat ketidakjelasan dalam memahami dan menerapkan ketentuan PUIL 2000. Untuk itu permintaan penjelasan dapat ditujukan kepada Panitia Tetap PUIL.
PUIL 2000 ini diharapkan dapat memenuhi keperluan pada ahli dan teknisi dalam melaksanakan tugasnya sebagai perancang, pelaksana, pemilik instalasi listrik dan para inspektor instalasi listrik. Meskipun telah diusahakan sebaik-baiknya, panitia revisi merasa bahwa dalam persyaratan ini mungkin masih terdapat kekurangannya. Tanggapan dan saran untuk perbaikan persyaratan ini sangat diharapkan.
PUIL 2000 ini tidak mungkin terwujud tanpa kerja keras dari seluruh anggota Panitia Revisi PUIL 1987, dan pihak pihak terkait lainnya yang telah memberikan berbagai macam bantuan baik dalam bentuk tenaga, pikiran, sarana maupaun dana sehingga PUIL 2000 dapat diterbitkan dalam bentuknya yang sekarang. Atas segala bantuan tersebut Panitia Revisi PUIL mengucapkan terima kasih sebesar besarnya.
Peraturan instalasi listrik yang pertama kali digunakan sebagai pedoman beberapa instansi yang berkaitan dengan instalasi listrik adalah AVE (Algemene Voorschriften voor Electrische Sterkstroom Instalaties) yang diterbitkan sebagai Norma N 2004 oleh Dewan Normalisasi Pemerintah Hindia Belanda. Kemudian AVE N 2004 ini diterjemahkan ke dalam bahasa Indonesia dan diterbitkan pada tahun 1964 sebagai Norma Indonesia NI6 yang kemudian dikenal sebagai Peraturan Umum Instalasi Listrik disingkat PUIL 1964, yang merupakan penerbitan pertama dan PUIL 1977 dan PUIL 1987 adalah penerbitan PUIL yang kedua dan ketiga yang merupakan hasil penyempurnaan atau revisi dari PUIL sebelumnya, maka PUIL 2000 ini merupakan terbitan ke 4.
Jika dalam penerbitan PUIL 1964, 1977 dan 1987 nama buku ini adalah Peraturan Umum Instalasi Listrik, maka pada penerbitan sekarang tahun 2000, namanya menjadi Persyaratan Umum Instalasi Listrik dengan tetap mempertahankan singkatannya yang sama yaitu PUIL.
Penggantian dari kata “Peraturan” menjadi “Persyaratan” dianggap lebih tepat karena pada perkataan “peraturan” terkait pengertian adanya kewajiban untuk mematuhi ketentuannya dan sangsinya. Sebagaimana diketahui sejak AVE sampai dengan PUIL 1987 pengertian kewajiban mematuhi ketentuan dan sangsinya tidak diberlakukan sebab isinya selain mengandung hal-hal yang dapat dijadikan peraturan juga mengandung rekomendasi ataupun ketentuan atau persyaratan teknis yang dapat dijadikan pedoman dalam pelaksanaan pekerjaan instalasi listrik.
Sejak dilakukannya penyempurnaan PUIL 1964, publikasi atau terbitan standar IEC (International Electrotechnical Commission) khususnya IEC 60364 menjadi salah satu acuan utama disamping standar internasional lainnya. Juga dalam terbitan PUIL 2000, usaha untuk lebih mengacu IEC ke dalam PUIL terus dilakukan, walaupun demikian dari segi kemanfaatan atau kesesuaian dengan keadaan di Indonesia beberapa ketentuan mengacu pada standar dari NEC (National Electric Code), VDE (Verband Deutscher Elektrotechniker) dan SAA (Standards Association Australia).
PUIL 2000 merupakan hasil revisi dari PUIL 1987, yang dilaksanakan oleh Panitia Revisi PUIL 1987 yang ditetapkan oleh Menteri Pertambangan dan Energi dalam Surat Keputusan Menteri No:24-12/40/600.3/1999, tertanggal 30 April 1999 dan No:51-12/40/600.3/1999, tertanggal 20 Agustus 1999. Anggota Panitia Revisi PUIL tersebut terdiri dari wakil dari berbagai Departemen seperti DEPTAMBEN, DEPKES, DEPNAKER, DEPERINDAG, BSN, PT PLN, PT Pertamina, YUPTL, APPI, AKLI, INKINDO, APKABEL, APITINDO, MKI, HAEI, Perguruan Tinggi ITB, ITI, ISTN, UNTAG, STTY-PLN, PT Schneider Indonesia dan pihak pihak lain yang terkait.
Bagian 1 dan Bagian 2 tentang Pendahuluan dan Persyaratan dasar merupakan padanan dari IEC 364-1 Part 1 dan Part 2 tentang Scope, Object Fundamental Principles and Definitions.
Bagian 3 tentang Proteksi untuk keselamatan banyak mengacu pada IEC 60364 Part 4 tentang Protection for safety. Bahkan istilah yang berkaitan dengan tindakan proteksi seperti SELV yang bahasa Indonesianya adalah tegangan extra rendah pengaman digunakan sebagai istilah baku, demikian pula istilah PELV dan FELV. PELV adalah istilah SELV yang dibumikan sedangkan FELV adalah sama dengan tegangan extra rendah fungsional. Sistem kode untuk menunjukan tingkat proteksi yang diberikan oleh selungkup dari sentuh langsung ke bagian yang berbahaya, seluruhnya diambil dari IEC dengan kode IP (International Protection). Demikian pula halnya dengan pengkodean jenis sistem pembumian. Kode TN mengganti kode PNP dalam PUIL 1987, demikian juga kode TT untuk kode PP dan kode IT untuk kode HP.
Bagian 4 tentang Perancangan instalasi listrik, dalam IEC 60364 Part 3 yaitu Assessment of General Characteristics, tetapi isinya banyak mengutip dari SAA Wiring Rules dalam section General Arrangement tentang perhitungan kebutuhan maksimum dan penentuan jumlah titik sambung pada sirkit akhir.
Bagian 5 tentang Perlengkapan Listrik mengacu pada IEC 60364 Part 5: Selection and erection of electrical equipment dan standar NEC.
Bagian 6 tentang Perlengkapan hubung bagi dan kendali (PHB) serta komponennya merupakan pengembangan Bab 6 PUIL 1987 dengan ditambah unsur unsur dari NEC.
Bagian 7 tentang Penghantar dan pemasangannya tidak banyak berubah dari Bab 7 PUIL 1987. Perubahan yang ada mengacu pada IEC misalnya cara penulisan kelas tegangan dari penghantar. Ketentuan dalam Bagian 7 ini banyak mengutip dari standar VDE. Dan hal hal yang berkaitan dengan tegangan tinggi dihapus.
Bagian 8 tentang Ketentuan untuk berbagai ruang dan instalasi khusus merupakan pengembangan dari Bab 8 PUIL 1987. Dalam PUIL 2000 dimasukkan pula klarifikasi zona yang diambil dari IEC, yang berpengaruh pada pemilihan dari perlengkapan listrik dan cara pemasangannya di berbagai ruang khusus. Ketentuan dalam Bagian 8 ini merupakan bagian dari IEC 60364 Part 7, Requirements for special installations or locations.
Bagian 9 meliputi Pengusahaan instalasi listrik. Pengusahaan dimaksudkan sebagai perancangan, pembangunan, pemasangan, pelayanan, pemeliharaan, pemeriksaan dan pengujian instalasi listrik serta proteksinya. Di IEC 60364, pemeriksaan dan pengujian awal instalasi listrik dibahas dalam Part 6: Verification. PUIL 2000 berlaku untuk instalasi listrik dalam bangunan dan sekitarnya untuk tegangan rendah sampai 1000 V a.b dan 1500 V a.s, dan gardu transformator distribusi tegangan menengah sampai dengan 35 kV. Ketentuan tentang transformator distribusi tegangan menengah mengacu dari NEC 1999.
Pembagian dalam sembilan bagian dengan judulnya pada dasarnya sama dengan bagian yang sama pada PUIL 1987. PUIL 2000 tidak menyebut pembagiannya dalam Pasal, Subpasal, Ayat atau Subayat. Pembedaan tingkatnya dapat dilihat dari sistim penomorannya dengan digit. Contohnya Bagian 4, dibagi dalam 4.1; 4.2; dan seterusnya, sedangkan 4.2 dibagi dalam 4.2.1 sampai dengan 4.2.9 dibagi lagi dalam 4.2.9.1 sampai dengan 4.2.9.4. Jadi untuk menunjuk kepada suatu ketentuan, cukup dengan menuliskan nomor dengan jumlah digitnya.
Seperti halnya pada PUIL 1987, PUIL 2000 dilengkapi pula dengan indeks dan lampiran lampiran lainnya pada akhir buku. Lampiran mengenai pertolongan pertama pada korban kejut listrik yang dilakukan dengan pemberian pernapasan bantuan, diambilkan dari standar SAA, berbeda dengan PUIL 1987.
Untuk menampung perkembangan di bidang instalasi listrik misalnya karena adanya ketentuan baru dalam IEC yang dipandang penting untuk dimasukkan dalam PUIL, atau karena adanya saran, tanggapan dari masyarakat pengguna PUIL, maka dikandung maksud bila dipandang perlu akan menerbitkan amandemen pada PUIL 2000. Untuk menangani hal hal tersebut telah dibentuk Panitia Tetap PUIL. Panitia Tetap PUIL dapat diminta pendapatnya jika terdapat ketidakjelasan dalam memahami dan menerapkan ketentuan PUIL 2000. Untuk itu permintaan penjelasan dapat ditujukan kepada Panitia Tetap PUIL.
PUIL 2000 ini diharapkan dapat memenuhi keperluan pada ahli dan teknisi dalam melaksanakan tugasnya sebagai perancang, pelaksana, pemilik instalasi listrik dan para inspektor instalasi listrik. Meskipun telah diusahakan sebaik-baiknya, panitia revisi merasa bahwa dalam persyaratan ini mungkin masih terdapat kekurangannya. Tanggapan dan saran untuk perbaikan persyaratan ini sangat diharapkan.
PUIL 2000 ini tidak mungkin terwujud tanpa kerja keras dari seluruh anggota Panitia Revisi PUIL 1987, dan pihak pihak terkait lainnya yang telah memberikan berbagai macam bantuan baik dalam bentuk tenaga, pikiran, sarana maupaun dana sehingga PUIL 2000 dapat diterbitkan dalam bentuknya yang sekarang. Atas segala bantuan tersebut Panitia Revisi PUIL mengucapkan terima kasih sebesar besarnya.
Motor listrik
Motor listrik adalah alat untuk mengubah energi listrik menjadi energi mekanik. Alat yang berfungsi sebaliknya, mengubah energi mekanik menjadi energi listrik disebut generator atau dinamo. Motor listrik dapat ditemukan pada peralatan rumah tangga seperti kipas angin, mesin cuci, pompa air dan penyedot debu.
Motor listrik yang umum digunakan di dunia Industri adalah motor listrik asinkron, dengan dua standar global yakni IEC dan NEMA. Motor asinkron IEC berbasis metrik (milimeter), sedangkan motor listrik NEMA berbasis imperial (inch), dalam aplikasi ada satuan daya dalam horsepower (hp) maupun kiloWatt (kW).
Motor listrik IEC dibagi menjadi beberapa kelas sesuai dengan efisiensi yang dimilikinya, sebagai standar di EU, pembagian kelas ini menjadi EFF1, EFF2 dan EFF3. EFF1 adalah motor listrik yang paling efisien, paling sedikit memboroskan tenaga, sedangkan EFF3 sudah tidak boleh dipergunakan dalam lingkungan EU, sebab memboroskan bahan bakar di pembangkit listrik dan secara otomatis akan menimbulkan buangan karbon yang terbanyak, sehingga lebih mencemari lingkungan.
Standar IEC yang berlaku adalah IEC 34-1, ini adalah sebuah standar yang mengatur rotating equipment bertenaga listrik. Ada banyak pabrik elektrik motor, tetapi hanya sebagian saja yang benar-benar mengikuti arahan IEC 34-1 dan juga mengikuti arahan level efisiensi dari EU.
Banyak produsen elektrik motor yang tidak mengikuti standar IEC dan EU supaya produknya menjadi murah dan lebih banyak terjual, banyak negara berkembang manjdi pasar untuk produk ini, yang dalam jangka panjang memboroskan keuangan pemakai, sebab tagihan listrik yang semakin tinggi setiap tahunnya.
Lembaga yang mengatur dan menjamin level efisiensi ini adalah CEMEP, sebuah konsorsium di Eropa yang didirikan oleh pabrik-pabrik elektrik motor yang ternama, dengan tujuan untuk menyelamatkan lingkungan dengan mengurangi pencemaran karbon secara global, karena banyak daya diboroskan dalam pemakaian beban listrik.
Sebagai contoh, dalam sebuah industri rata-rata konsumsi listrik untuk motor listrik adalah sekitar 65-70% dari total biaya listrik, jadi memakai elektrik motor yang efisien akan mengurangi biaya overhead produksi, sehingga menaikkan daya saing produk, apalagi dengan kenaikan tarif listrik setiap tahun, maka pemakaian motor listrik EFF1 sudah waktunya menjadi keharusan.

 Prinsip kerja motor listrikPada motor listrik tenaga listrik diubah menjadi tenaga mekanik. Perubahan ini dilakukan dengan mengubah tenaga listrik menjadi magnet yang disebut sebagai elektro magnit. Sebagaimana kita ketahui bahwa : kutub-kutub dari magnet yang senama akan tolak-menolak dan kutub-kutub tidak senama, tarik-menarik. Maka kita dapat memperoleh gerakan jika kita menempatkan sebuah magnet pada sebuah poros yang dapat berputar, dan magnet yang lain pada suatu kedudukan yang tetap.
Prinsip kerja motor listrikPada motor listrik tenaga listrik diubah menjadi tenaga mekanik. Perubahan ini dilakukan dengan mengubah tenaga listrik menjadi magnet yang disebut sebagai elektro magnit. Sebagaimana kita ketahui bahwa : kutub-kutub dari magnet yang senama akan tolak-menolak dan kutub-kutub tidak senama, tarik-menarik. Maka kita dapat memperoleh gerakan jika kita menempatkan sebuah magnet pada sebuah poros yang dapat berputar, dan magnet yang lain pada suatu kedudukan yang tetap.
Motor listrik yang umum digunakan di dunia Industri adalah motor listrik asinkron, dengan dua standar global yakni IEC dan NEMA. Motor asinkron IEC berbasis metrik (milimeter), sedangkan motor listrik NEMA berbasis imperial (inch), dalam aplikasi ada satuan daya dalam horsepower (hp) maupun kiloWatt (kW).
Motor listrik IEC dibagi menjadi beberapa kelas sesuai dengan efisiensi yang dimilikinya, sebagai standar di EU, pembagian kelas ini menjadi EFF1, EFF2 dan EFF3. EFF1 adalah motor listrik yang paling efisien, paling sedikit memboroskan tenaga, sedangkan EFF3 sudah tidak boleh dipergunakan dalam lingkungan EU, sebab memboroskan bahan bakar di pembangkit listrik dan secara otomatis akan menimbulkan buangan karbon yang terbanyak, sehingga lebih mencemari lingkungan.
Standar IEC yang berlaku adalah IEC 34-1, ini adalah sebuah standar yang mengatur rotating equipment bertenaga listrik. Ada banyak pabrik elektrik motor, tetapi hanya sebagian saja yang benar-benar mengikuti arahan IEC 34-1 dan juga mengikuti arahan level efisiensi dari EU.
Banyak produsen elektrik motor yang tidak mengikuti standar IEC dan EU supaya produknya menjadi murah dan lebih banyak terjual, banyak negara berkembang manjdi pasar untuk produk ini, yang dalam jangka panjang memboroskan keuangan pemakai, sebab tagihan listrik yang semakin tinggi setiap tahunnya.
Lembaga yang mengatur dan menjamin level efisiensi ini adalah CEMEP, sebuah konsorsium di Eropa yang didirikan oleh pabrik-pabrik elektrik motor yang ternama, dengan tujuan untuk menyelamatkan lingkungan dengan mengurangi pencemaran karbon secara global, karena banyak daya diboroskan dalam pemakaian beban listrik.
Sebagai contoh, dalam sebuah industri rata-rata konsumsi listrik untuk motor listrik adalah sekitar 65-70% dari total biaya listrik, jadi memakai elektrik motor yang efisien akan mengurangi biaya overhead produksi, sehingga menaikkan daya saing produk, apalagi dengan kenaikan tarif listrik setiap tahun, maka pemakaian motor listrik EFF1 sudah waktunya menjadi keharusan.
Prinsip kerja motor listrik

kontaktor
Kontaktor adalah jenis saklar yang bekerja secara magnetik yaitu kontak bekerja apabila kumparan diberi energi. The National Manufacture Assosiation (NEMA) mendefinisikan kontaktor magnetis sebagai alat yang digerakan secara magnetis untuk menyambung dan membuka rangkaian daya listrik. Tidak seperti relay, kontaktor dirancang untuk menyambung dan membuka rangkaian daya listrik tanpa merusak. Beban-beban tersebut meliputi lampu, pemanas, transformator, kapasitor, dan motor listrik.
 Prinsip Kerja
Prinsip Kerja
Sebuah kontaktor terdiri dari koil, beberapa kontak Normally Open ( NO ) dan beberapa Normally Close ( NC ). Pada saat satu kontaktor normal, NO akan membuka dan pada saat kontaktor bekerja, NO akan menutup. Sedangkan kontak NC sebaliknya yaitu ketika dalam keadaan normal kontak NC akan menutup dan dalam keadaan bekerja kontak NC akan membuka. Koil adalah lilitan yang apabila diberi tegangan akan terjadi magnetisasi dan menarik kontak-kontaknya sehingga terjadi perubahan atau bekerja. Kontaktor yang dioperasikan secara elektromagnetis adalah salah satu mekanisme yang paling bermanfaat yang pernah dirancang untuk penutupan dan pembukaan rangkaian listrik maka gambar prinsip kerja kontaktor magnet dapat dilihat pada gambar berikut :

Kontaktor termasuk jenis saklar motor yang digerakkan oleh magnet seperti yang telah dijelaskan di atas. Bila pada jepitan a dan b kumparan magnet diberi tegangan, maka magnet akan menarik jangkar sehingga kontak-kontak bergerak yang berhubungan dengan jangkar tersebut ikut tertarik. Tegangan yang harus dipasangkan dapat tegangan bolak balik ( AC ) maupun tegangan searah ( DC ), tergantung dari bagaimana magnet tersebut dirancangkan. Untuk beberapa keperluan digunakan juga kumparan arus ( bukan tegangan ), akan tetapi dari segi produksi lebih disukai kumparan tegangan karena besarnya tegangan umumnya sudah dinormalisasi dan tidak tergantung dari keperluan alat pemakai tertentu.
Karakteristik
Spesifikasi kontaktor magnet yang harus diperhatikan adalah kemampuan daya kontaktor ditulis dalam ukuran Watt / KW, yang disesuaikan dengan beban yang dipikul, kemampuan menghantarkan arus dari kontak – kontaknya, ditulis dalam satuan ampere, kemampuan tegangan dari kumparan magnet, apakah untuk tegangan 127 Volt atau 220 Volt, begitupun frekuensinya, kemampuan melindungi terhadap tegangan rendah, misalnya ditulis ± 20 % dari tegangan kerja. Dengan demikian dari segi keamanan dan kepraktisan, penggunaan kontaktor magnet jauh lebih baik dari pada saklar biasa.
Aplikasi
Keuntungan penggunaan kontaktor magnetis sebagai pengganti peralatan kontrol yang dioperasikan secara manual meliputi hal :
a.Pada penangan arus besar atau tegangan tinggi, sulit untuk membangun alat manual yang cocok. Lebih dari itu, alat seperti itu besar dan sulit mengoperasikannya. Sebaliknya, akan relatif sederhana untuk membangun kontaktor magnetis yang akan menangani arus yang besar atau tegangan yang tinggi, dan alat manual harus mengontrol hanya kumparan dari kontaktor.
b.Kontaktor memungkinkan operasi majemuk dilaksanakan dari satu operator (satu lokasi) dan diinterlocked untuk mencegah kesalahan dan bahaya operasi.
c.Pengoperasian yang harus diulang beberapa kali dalam satu jam, dapat digunakan kontaktor untuk menghemat usaha. Operator secara sederhana harus menekan tombol dan kontaktor akan memulai urutan event yang benar secara otomatis.
d.Kontaktor dapat dikontrol secara otomatis dengan alat pilot atau sensor yang sangat peka.
e.Tegangan yang tinggi dapat diatasi oleh kontaktor dan menjauhkan seluruhnya dari operator, sehingga meningkatkan keselamatan / keamanan instalasi.
f.Dengan menggunakan kontaktor peralatan kontrol dapat dipasangkan pada titik-titik yang jauh. Satu-satunya ruang yang diperlukan dekat mesin adalah ruangan untuk tombol tekan.
g.Dengan kontaktor, kontrol otomatis dan semi otomatis mungkin dilakukan dengan peralatan seperti kontrol logika yang dapat diprogram seperti Programmable Logic Controller (PLC).
Adapun peralatan elektromekanis jenis kontaktor magnet dapat dilihat pada gambar berikut :

Sebuah kontaktor terdiri dari koil, beberapa kontak Normally Open ( NO ) dan beberapa Normally Close ( NC ). Pada saat satu kontaktor normal, NO akan membuka dan pada saat kontaktor bekerja, NO akan menutup. Sedangkan kontak NC sebaliknya yaitu ketika dalam keadaan normal kontak NC akan menutup dan dalam keadaan bekerja kontak NC akan membuka. Koil adalah lilitan yang apabila diberi tegangan akan terjadi magnetisasi dan menarik kontak-kontaknya sehingga terjadi perubahan atau bekerja. Kontaktor yang dioperasikan secara elektromagnetis adalah salah satu mekanisme yang paling bermanfaat yang pernah dirancang untuk penutupan dan pembukaan rangkaian listrik maka gambar prinsip kerja kontaktor magnet dapat dilihat pada gambar berikut :
Kontaktor termasuk jenis saklar motor yang digerakkan oleh magnet seperti yang telah dijelaskan di atas. Bila pada jepitan a dan b kumparan magnet diberi tegangan, maka magnet akan menarik jangkar sehingga kontak-kontak bergerak yang berhubungan dengan jangkar tersebut ikut tertarik. Tegangan yang harus dipasangkan dapat tegangan bolak balik ( AC ) maupun tegangan searah ( DC ), tergantung dari bagaimana magnet tersebut dirancangkan. Untuk beberapa keperluan digunakan juga kumparan arus ( bukan tegangan ), akan tetapi dari segi produksi lebih disukai kumparan tegangan karena besarnya tegangan umumnya sudah dinormalisasi dan tidak tergantung dari keperluan alat pemakai tertentu.
Karakteristik
Spesifikasi kontaktor magnet yang harus diperhatikan adalah kemampuan daya kontaktor ditulis dalam ukuran Watt / KW, yang disesuaikan dengan beban yang dipikul, kemampuan menghantarkan arus dari kontak – kontaknya, ditulis dalam satuan ampere, kemampuan tegangan dari kumparan magnet, apakah untuk tegangan 127 Volt atau 220 Volt, begitupun frekuensinya, kemampuan melindungi terhadap tegangan rendah, misalnya ditulis ± 20 % dari tegangan kerja. Dengan demikian dari segi keamanan dan kepraktisan, penggunaan kontaktor magnet jauh lebih baik dari pada saklar biasa.
Aplikasi
Keuntungan penggunaan kontaktor magnetis sebagai pengganti peralatan kontrol yang dioperasikan secara manual meliputi hal :
a.Pada penangan arus besar atau tegangan tinggi, sulit untuk membangun alat manual yang cocok. Lebih dari itu, alat seperti itu besar dan sulit mengoperasikannya. Sebaliknya, akan relatif sederhana untuk membangun kontaktor magnetis yang akan menangani arus yang besar atau tegangan yang tinggi, dan alat manual harus mengontrol hanya kumparan dari kontaktor.
b.Kontaktor memungkinkan operasi majemuk dilaksanakan dari satu operator (satu lokasi) dan diinterlocked untuk mencegah kesalahan dan bahaya operasi.
c.Pengoperasian yang harus diulang beberapa kali dalam satu jam, dapat digunakan kontaktor untuk menghemat usaha. Operator secara sederhana harus menekan tombol dan kontaktor akan memulai urutan event yang benar secara otomatis.
d.Kontaktor dapat dikontrol secara otomatis dengan alat pilot atau sensor yang sangat peka.
e.Tegangan yang tinggi dapat diatasi oleh kontaktor dan menjauhkan seluruhnya dari operator, sehingga meningkatkan keselamatan / keamanan instalasi.
f.Dengan menggunakan kontaktor peralatan kontrol dapat dipasangkan pada titik-titik yang jauh. Satu-satunya ruang yang diperlukan dekat mesin adalah ruangan untuk tombol tekan.
g.Dengan kontaktor, kontrol otomatis dan semi otomatis mungkin dilakukan dengan peralatan seperti kontrol logika yang dapat diprogram seperti Programmable Logic Controller (PLC).
Senin, 07 November 2011
PNEUMATIC
Pneumatik (bahasa Yunani: πνευματικός, pneumatikos) berasal dari kata dasar "pneu" yang berarti udara tekan dan "matik" yang berarti ilmu atau hal-hal yang berhubungan dengan sesuatu; sehingga arti lengkap pneumatik adalah ilmu/hal-hal yang berhubungan dengan udara bertekanan.
Katup kontrol arah adalah alat atau instrumentasi pneumatic yang berfungsi sebagai switch/saklar aliran udara. Pensaklaran yang diaplikasikan memiliki banyak sistem, diantaranya memakai coil selenoid, penggerak tangan atau mekanik lain. KKA juga difungsikan sebagai serangkaian fungsi logika atau timer pneumatik. Penggambaran simbol KKA pada sistem peumatik
1. Simbol
Cara membaca simbol katup pneumatik sebagai berikut :
 Simbol-simbol katup kontrol arah sebagai berikut :
Simbol-simbol katup kontrol arah sebagai berikut :
 2. Penomoran pada Lubang
2. Penomoran pada Lubang
Sistem penomoran yang digunakan untuk menandai KKA sesuai dengan DIN ISO 5599. Sistem
huruf terdahulu digunakan dan sistem penomoran dijelaskan sebagai berikut :
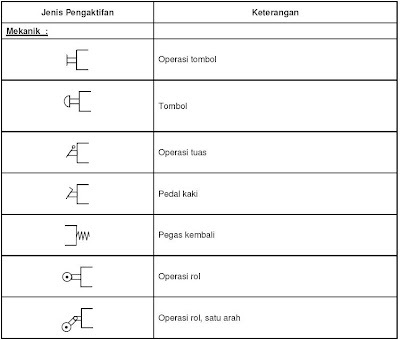
 3. Metode Pengaktifan
3. Metode Pengaktifan
Metode pengaktifan KKA bergantung pada tugas yang diperlukan . Jenis pengaktifan bervariasi ,
seperti secara mekanis, pneumatis, elektris dan kombinasi dari semuanya. Simbol metode pengaktifan
diuraikan dalam standar DIN 1219 berikut ini :

Contoh Simbol Aplikasi KKA sebagai berikut:

Contoh solenoid valve/katup kontrol arah

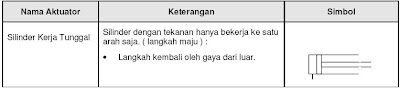
Actuator CylinderActuator cylinder adalah katup yang digunakan untuk menggerakkan beban berat. Memiliki 2 type, single action dan double action. Single action dimana pergerakan batang aktuator setengahnyadilakukan oleh pegas, sedangkan double action dua pergerakan keluar dan kedalam sama2 dilakukan oleh pneumatic.
Berikut ini adalah symbol dan gambar aktuator
System single action, input di bagian belakang pneumatic akan mendorong batang keluar. Jika udara pneumatic off maka batang kembali kebelakang dengan pegas
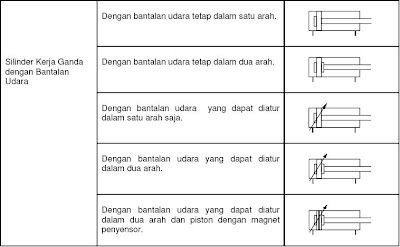
 System double action, dua input pneumatic digunakan untuk mendorong batang keluar dan kedalam
System double action, dua input pneumatic digunakan untuk mendorong batang keluar dan kedalam

Berikut ini tabel jenis cylinder lengkap

Check ValveMerupakan valve dengan mekanisme nonreturn, sistem pegas dan katupnya hanya memperbolehkan aliran udara lewat dengan satu arah saja. Check valve ini banyak digunakan pada rangkaian pengaman2 pneumatic.
Symbol dari chek valve adalah sebagai berikut
 Contoh chek valve adalah sebagai berikut:
Contoh chek valve adalah sebagai berikut:

Valve Aplikasi KhususValve aplikasi khusus yaitu valve OR, valve AND, valve quick exhaust, flow control valve, regulator control valve
Sistem Sumber Udara PneumaticSumber udara pneumatic merupakan perangkat yang menghasilkan udara pneumatic berserta perangkat yang ada pada jalur udara pneumatic.
Perancangan Sistem Kontrol PneumatikDalam suatu sistem kontrol pneumatik terdapat arsitektur dan bagian-bagian yang menyangkut fungsi kerja alat tersebut. Perancangan sistem kontrol pneumatik mengacu pada diagram alir sistem
Diagram alir
Diagram rangkaian harus digambar dengan tata cara penggambaran yang
benar. Karena hal ini akan memudahkan seseorang untuk membaca rangkaian ,
sehingga mempermudah pada saat merangkai atau mencari kesalahan sistem
pneumatik.
Tata letak komponen diagram rangkaian harus disesuaikan dengan
diagram alir dari mata rantai kontrol yaitu sebuah sinyal harus mulai mengalir dari
bawah menuju ke atas dari gambar rangkaian. Elemen yang dibutuhkan untuk
catu daya akan digambarkan pada bagian bawah rangkaian secara simbol
sederhana atau komponen penuh dapat digunakan. Pada rangkaian yang lebih
luas , bagian catu daya seperti unit pemelihara, katup pemutus dan berbagai
distribusi sambungan dapat digambarkan tersendiri.
Diagram alir mata rantai kontrol dan elemen-elemennya digambarkan
sebagai berikut :


Tata Letak Rangkaian
Yang dimaksud tata letak rangkaian adalah diagram rangkaian harus
digambar tanpa mempertimbangkan lokasi tiap elemen yang diaktifkan secara
fisik. Dianjurkan bahwa semua silinder dan katup kontrol arah digambarkan
secara horisontal dengan silinder bergerak dari kiri ke kanan, sehingga rangkaian
lebih mudah dimengerti.
Contoh :
Batang piston silinder kerja ganda bergerak keluar jika tombol tekan atau
pedal kaki ditekan. Batang piston kembali ke posisi awal setelah keluar penuh
dan tekanan pada tombol atau pedal kaki dilepas.
Masalah di atas dipecahkan oleh rangkaian kontrol dengan tata letak
gambar diagram berikut ini.
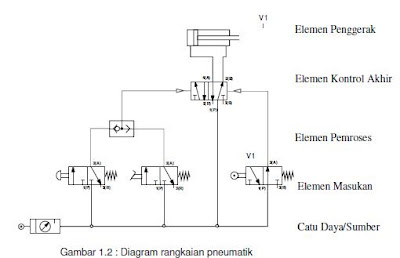
Gambar 1.2 menunjukkan perbedaan antara posisi gambar dengan lokasi
benda/elemen sesungguhnya. Pada praktiknya katup V1 terletak pada posisi
akhir langkah keluar silinder. Pada diagram rangkaian elemen V1 digambar pada
tingkat sinyal masukan dan tidak mencerminkan posisi katup. Penandaan V1
pada posisi silinder keluar penuh menunjukkan posisi sesungguhnya dari katup
V1 tersebut.
Diagram rangkaian memperlihatkan aliran sinyal dan hubungan antara
komponen dan lubang saluran udara. Diagram rangkaian tidak menjelaskan tata
letak komponen secara mekanik.
Rangkaian digambar dengan aliran energi dari bawah ke atas. Yang
terdapat dalam rangkaian meliputi sumber energi, masukan sinyal, pengolah
sinyal, elemen kontrol akhir dan elemen penggerak (aktuator). Posisi katup
pembatas ditandai pada aktuator.
Jika kontrol rumit dan terdiri dari beberapa elemen kerja, rangkaian kontrol
harus dibagi ke dalam rangkaian rantai kontrol yang terpisah. Satu rantai dapat
dibentuk untuk setiap fungsi grup. Kalau mungkin, rantai-rantai ini sebaiknya
disusun berdampingan dalam urutan yang sama dengan gerakan langkah
operasinya.
Sistem Pneumatic
Katup Kontrol Arah ( KKA )Katup kontrol arah adalah alat atau instrumentasi pneumatic yang berfungsi sebagai switch/saklar aliran udara. Pensaklaran yang diaplikasikan memiliki banyak sistem, diantaranya memakai coil selenoid, penggerak tangan atau mekanik lain. KKA juga difungsikan sebagai serangkaian fungsi logika atau timer pneumatik. Penggambaran simbol KKA pada sistem peumatik
1. Simbol
Cara membaca simbol katup pneumatik sebagai berikut :
 Simbol-simbol katup kontrol arah sebagai berikut :
Simbol-simbol katup kontrol arah sebagai berikut : 2. Penomoran pada Lubang
2. Penomoran pada LubangSistem penomoran yang digunakan untuk menandai KKA sesuai dengan DIN ISO 5599. Sistem
huruf terdahulu digunakan dan sistem penomoran dijelaskan sebagai berikut :
 3. Metode Pengaktifan
3. Metode PengaktifanMetode pengaktifan KKA bergantung pada tugas yang diperlukan . Jenis pengaktifan bervariasi ,
seperti secara mekanis, pneumatis, elektris dan kombinasi dari semuanya. Simbol metode pengaktifan
diuraikan dalam standar DIN 1219 berikut ini :


Contoh Simbol Aplikasi KKA sebagai berikut:

Contoh solenoid valve/katup kontrol arah

Actuator CylinderActuator cylinder adalah katup yang digunakan untuk menggerakkan beban berat. Memiliki 2 type, single action dan double action. Single action dimana pergerakan batang aktuator setengahnyadilakukan oleh pegas, sedangkan double action dua pergerakan keluar dan kedalam sama2 dilakukan oleh pneumatic.
Berikut ini adalah symbol dan gambar aktuator
System single action, input di bagian belakang pneumatic akan mendorong batang keluar. Jika udara pneumatic off maka batang kembali kebelakang dengan pegas
 System double action, dua input pneumatic digunakan untuk mendorong batang keluar dan kedalam
System double action, dua input pneumatic digunakan untuk mendorong batang keluar dan kedalam

Berikut ini tabel jenis cylinder lengkap



Check ValveMerupakan valve dengan mekanisme nonreturn, sistem pegas dan katupnya hanya memperbolehkan aliran udara lewat dengan satu arah saja. Check valve ini banyak digunakan pada rangkaian pengaman2 pneumatic.
Symbol dari chek valve adalah sebagai berikut
 Contoh chek valve adalah sebagai berikut:
Contoh chek valve adalah sebagai berikut:
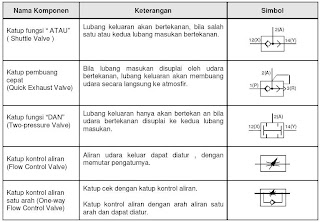
Valve Aplikasi KhususValve aplikasi khusus yaitu valve OR, valve AND, valve quick exhaust, flow control valve, regulator control valve
- valve OR memiliki fungsi kerja OR dimana bila salah satu inputnya aktif maka output akan aktif
- valve AND memiliki fungsi kerja AND dimana mengharuskan semua inputnya aktif untuk mengaktifkan output
- valve quick exhaust untuk melakukan pembuangan udara yang cepat bila input tanpa udara
- flow control valve digunakan untuk mengatur aliran udara yang masuk ke dalam jalur pneumatic
- regulator control valve, berfungsi sama dengan flow control valve tetapi memiliki tambahan mekanisme non return valve

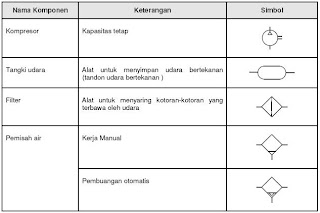
Sistem Sumber Udara PneumaticSumber udara pneumatic merupakan perangkat yang menghasilkan udara pneumatic berserta perangkat yang ada pada jalur udara pneumatic.
- Penyedia udara/Kompressor adalah mesin yang menghasilkan udara pneumatic dengan tekanan kerja yang dipakai dalam sistem pneumatic (2,5 ~ 7 bar)
- Tangki atau pengumpul udara/header berupa sistem pengumpul udara pneumatic (storage) sementara sebelum distribusi
- Filter digunakan untuk menyaring udara pneumatic dari kotoran. Penyaring filter ini disesuaikan dengan kebutuhan udara pneumatic
- Driyer /pengering digunakan untuk mengeringkan udara pneumatic dari uap air
- Pemisah air, sistem pemisah air ini biasanya dibuat dalam suatu sistem yang lengkap dengan pressure regulator. Digunakan untuk memisahkan kadar air dalam udara pneumatic
- System pelumas, digunakan untuk aplikasi kusus terhadap instrumentasi pneumatic
- Meter pneumatic /manometer berupa indikator tekanan pada suatu jalur atau tangki pneumatic
- Sumber tekanan berupa terminal dari suatu header atau jalur lain

Perancangan Sistem Kontrol PneumatikDalam suatu sistem kontrol pneumatik terdapat arsitektur dan bagian-bagian yang menyangkut fungsi kerja alat tersebut. Perancangan sistem kontrol pneumatik mengacu pada diagram alir sistem
Diagram alir
Diagram rangkaian harus digambar dengan tata cara penggambaran yang
benar. Karena hal ini akan memudahkan seseorang untuk membaca rangkaian ,
sehingga mempermudah pada saat merangkai atau mencari kesalahan sistem
pneumatik.
Tata letak komponen diagram rangkaian harus disesuaikan dengan
diagram alir dari mata rantai kontrol yaitu sebuah sinyal harus mulai mengalir dari
bawah menuju ke atas dari gambar rangkaian. Elemen yang dibutuhkan untuk
catu daya akan digambarkan pada bagian bawah rangkaian secara simbol
sederhana atau komponen penuh dapat digunakan. Pada rangkaian yang lebih
luas , bagian catu daya seperti unit pemelihara, katup pemutus dan berbagai
distribusi sambungan dapat digambarkan tersendiri.
Diagram alir mata rantai kontrol dan elemen-elemennya digambarkan
sebagai berikut :


Tata Letak Rangkaian
Yang dimaksud tata letak rangkaian adalah diagram rangkaian harus
digambar tanpa mempertimbangkan lokasi tiap elemen yang diaktifkan secara
fisik. Dianjurkan bahwa semua silinder dan katup kontrol arah digambarkan
secara horisontal dengan silinder bergerak dari kiri ke kanan, sehingga rangkaian
lebih mudah dimengerti.
Contoh :
Batang piston silinder kerja ganda bergerak keluar jika tombol tekan atau
pedal kaki ditekan. Batang piston kembali ke posisi awal setelah keluar penuh
dan tekanan pada tombol atau pedal kaki dilepas.
Masalah di atas dipecahkan oleh rangkaian kontrol dengan tata letak
gambar diagram berikut ini.

Gambar 1.2 menunjukkan perbedaan antara posisi gambar dengan lokasi
benda/elemen sesungguhnya. Pada praktiknya katup V1 terletak pada posisi
akhir langkah keluar silinder. Pada diagram rangkaian elemen V1 digambar pada
tingkat sinyal masukan dan tidak mencerminkan posisi katup. Penandaan V1
pada posisi silinder keluar penuh menunjukkan posisi sesungguhnya dari katup
V1 tersebut.
Diagram rangkaian memperlihatkan aliran sinyal dan hubungan antara
komponen dan lubang saluran udara. Diagram rangkaian tidak menjelaskan tata
letak komponen secara mekanik.
Rangkaian digambar dengan aliran energi dari bawah ke atas. Yang
terdapat dalam rangkaian meliputi sumber energi, masukan sinyal, pengolah
sinyal, elemen kontrol akhir dan elemen penggerak (aktuator). Posisi katup
pembatas ditandai pada aktuator.
Jika kontrol rumit dan terdiri dari beberapa elemen kerja, rangkaian kontrol
harus dibagi ke dalam rangkaian rantai kontrol yang terpisah. Satu rantai dapat
dibentuk untuk setiap fungsi grup. Kalau mungkin, rantai-rantai ini sebaiknya
disusun berdampingan dalam urutan yang sama dengan gerakan langkah
operasinya.
OVERLOAD
Pengertian overload khususnya dalam bidang elektronika adalah suatu keadaan dimana beban listrik yang mengalir melebihi kapasitas yang tersedia. Pengertian overload bisa juga di artikan sebagai melonjaknya suatu arus listrik yang mengalir pada suatu rangkaian di mana tidak sesuai dengan pengaturan yang telah di tetapkan.
Sebab-sebab terjadinya overload atau kelebihan muatan listrik bisa di karenakan terlalu besar sumber listrik yang di gunakan, atau terjadi kegagalan pada salah satu rangkaian yang menyebabkan naiknya beban listrik yang berlebihan
OVERLOAD MOTOR PROTECTION
Overload Motor Protection, yang dimaksud motor ini adalah electric motor yang oleh orang awam disebut dinamo. Dan disini dikhususkan yang terjadi pada motor AC 3 phase. Fungsi dari motor ini adalah sebagai penggerak atau untuk mengkonversi energi listrik menjadi mekanik/ gerak seperti lift, conveyor, blower, crusher dll. Dalam dunia industri saat ini peran yang dilakukan motor ini sangat vital. Untuk itu proteksi sangat diperlukan untuk menjaga kelancaran suatu proses.Sistem proteksi motor ini sudah lama dikenal dan berkembang seiring kemajuan teknologi. Mulai dari penggunaan eutic relay, thermal, sampai elektronik. Secara umum sistem kerja alat tersebut dapat dibagi menjadi dua yaitu dengan thermal dan elektronik.
THERMAL OVERLOAD
Sesuai dengan namanya proteksi motor ini menggunakan panas sebagai pembatas arus pada motor. Alat ini sangat banyak dipergunakan saat ini. Biasanya disebut TOR, Thermis atau overload relay. Cara kerja alat ini adalah dengan menkonversi arus yang mengalir menjadi panas untuk mempengaruhi bimetal. Nah , bimetal inilah yang menggerakkan tuas untuk menghentikan aliran listrik pada motor melalui suatu control motor starter (baca motor starter). Pembatasan dilakukan dengan mengatur besaran arus pada dial di alat tersebut. Jadi alat tersebut memiliki range adjustment misal TOR dengan range 1 ~ 3,2 Amp disetting 2,5 Amp. Artinya, kita membatasi arus dengan TOR pada level 2,5 Amp saja.
Bagaimana bila terjadi kelebihan arus/ overload pada motor starter? Seperti contoh di atas, TOR di setting 2,5 Amp dan semisal arus telah mencapai 3 ampere, apa yang kita harapkan ? Starter shut down/ Trip ! Benar, hanya kapan akan trip?? Secepatnya ?? Ini sangat tidak mungkin bila kita menggunakan Thermal Overload/ TOR. Nah…,terus seberapa cepat TOR itu akan trip ?? Dengan menggunakan bimetal sebagai pembatas tentu tidak dapat bereaksi secara cepat terhadap kenaikan arus. Perlu diketahui, TOR di pasaran memiliki beberapa type yang disebut Class. Jadi dengan memilih class yang berbeda maka kecepatan trip TOR akan berbeda pula. Saat ini terdapat TOR dengan Class 10, Class 15, Class 20 dll. Class ini menunjukkan kecepatan trip saat TOR dialiri arus sebesar 6X setting. Semisal, digunakan TOR class 20 dengan setting 10 Amp, saat arus mencapai 60 Amp alat ini akan trip setelah mencapai waktu 20 DETIK !! 6X setting dalam 20 DETIK !! Bagaimana jika kelebihan arus hanya pada 13 Amp saja? Kita bisa menunggu ber jam jam agar trip. Untuk lebih jelasnya mintalah kurva trip seperti pada gambar saat membeli TOR dan hitung kecepatan tripnya. Perlu diketahui kurva TOR adalah logaritmik bukan linier. So, kita tidak perlu lagi menyalahkan keakuratan TOR yang selama ini dipakai.
ELECTRONIC OVERLOAD
Overload electronic ini mempunya 2 karakteristik trip, INVERSE dan DEFINITE. Inverse, ia akan bekerja seperti thermal overload. Perbedaannya adalah kemampuannya untuk menggeser kurva trip. Jadi overload ini selain mempunyai setting arus juga kecepatan trip atau class adjustment. Selain itu dengan menggunakan rangkaian elektronik ia akan tidak mudah dipengaruhi suhu sekitar serta akurasi lebih terjaga. Definite, bekerja dengan pembatasan yang ketat. Dengan karakteristik ini, berapapun besar kelebihan beban ia akan trip setelah mencapai waktu yang ditentukan. Misal seting overload pada 10 amp dengan waktu trip 4 detik. Jika terjadi kelebihan beban lebih dari 10 amp selama lebih dari 4 detik dia akan trip. Kecepatan trip ini tidak tergantung besar arus overload (baik kecil atau besar sama saja).
Dengan menggunakan rangkaian elektronik biasanya alat ini dilengkapi dengan fasilitas proteksi lain seperti phaseloss protection, Lock Rotor Protection, Short Circuit Protection dll.
Dengan gambaran tersebut di atas, maka kita bisa menentukan kebutuhan overload protection yang diperlukan. Dan perlu di ingat bahwa, terbakarnya motor tidak hanya karena terjadinya overload. Overload hanyalah salah satu dari beberapa fakor penyebab terbakarnya motor. Seberapa tinggi tingkat proteksi motor yang kita perlukan tergantung dengan prioritas kita. Tetapi, overload protection tetaplah mutlak diperlukan dalam sebuah suatu sistem motor starter
THERMAL OVERLOAD
Sesuai dengan namanya proteksi motor ini menggunakan panas sebagai pembatas arus pada motor. Alat ini sangat banyak dipergunakan saat ini. Biasanya disebut TOR, Thermis atau overload relay. Cara kerja alat ini adalah dengan menkonversi arus yang mengalir menjadi panas untuk mempengaruhi bimetal. Nah , bimetal inilah yang menggerakkan tuas untuk menghentikan aliran listrik pada motor melalui suatu control motor starter (baca motor starter). Pembatasan dilakukan dengan mengatur besaran arus pada dial di alat tersebut. Jadi alat tersebut memiliki range adjustment misal TOR dengan range 1 ~ 3,2 Amp disetting 2,5 Amp. Artinya, kita membatasi arus dengan TOR pada level 2,5 Amp saja.
Bagaimana bila terjadi kelebihan arus/ overload pada motor starter? Seperti contoh di atas, TOR di setting 2,5 Amp dan semisal arus telah mencapai 3 ampere, apa yang kita harapkan ? Starter shut down/ Trip ! Benar, hanya kapan akan trip?? Secepatnya ?? Ini sangat tidak mungkin bila kita menggunakan Thermal Overload/ TOR. Nah…,terus seberapa cepat TOR itu akan trip ?? Dengan menggunakan bimetal sebagai pembatas tentu tidak dapat bereaksi secara cepat terhadap kenaikan arus. Perlu diketahui, TOR di pasaran memiliki beberapa type yang disebut Class. Jadi dengan memilih class yang berbeda maka kecepatan trip TOR akan berbeda pula. Saat ini terdapat TOR dengan Class 10, Class 15, Class 20 dll. Class ini menunjukkan kecepatan trip saat TOR dialiri arus sebesar 6X setting. Semisal, digunakan TOR class 20 dengan setting 10 Amp, saat arus mencapai 60 Amp alat ini akan trip setelah mencapai waktu 20 DETIK !! 6X setting dalam 20 DETIK !! Bagaimana jika kelebihan arus hanya pada 13 Amp saja? Kita bisa menunggu ber jam jam agar trip. Untuk lebih jelasnya mintalah kurva trip seperti pada gambar saat membeli TOR dan hitung kecepatan tripnya. Perlu diketahui kurva TOR adalah logaritmik bukan linier. So, kita tidak perlu lagi menyalahkan keakuratan TOR yang selama ini dipakai.
ELECTRONIC OVERLOAD
Overload electronic ini mempunya 2 karakteristik trip, INVERSE dan DEFINITE. Inverse, ia akan bekerja seperti thermal overload. Perbedaannya adalah kemampuannya untuk menggeser kurva trip. Jadi overload ini selain mempunyai setting arus juga kecepatan trip atau class adjustment. Selain itu dengan menggunakan rangkaian elektronik ia akan tidak mudah dipengaruhi suhu sekitar serta akurasi lebih terjaga. Definite, bekerja dengan pembatasan yang ketat. Dengan karakteristik ini, berapapun besar kelebihan beban ia akan trip setelah mencapai waktu yang ditentukan. Misal seting overload pada 10 amp dengan waktu trip 4 detik. Jika terjadi kelebihan beban lebih dari 10 amp selama lebih dari 4 detik dia akan trip. Kecepatan trip ini tidak tergantung besar arus overload (baik kecil atau besar sama saja).
Dengan menggunakan rangkaian elektronik biasanya alat ini dilengkapi dengan fasilitas proteksi lain seperti phaseloss protection, Lock Rotor Protection, Short Circuit Protection dll.
Dengan gambaran tersebut di atas, maka kita bisa menentukan kebutuhan overload protection yang diperlukan. Dan perlu di ingat bahwa, terbakarnya motor tidak hanya karena terjadinya overload. Overload hanyalah salah satu dari beberapa fakor penyebab terbakarnya motor. Seberapa tinggi tingkat proteksi motor yang kita perlukan tergantung dengan prioritas kita. Tetapi, overload protection tetaplah mutlak diperlukan dalam sebuah suatu sistem motor starter
Langganan:
Postingan (Atom)